


时间: 2024-08-24 10:10:18 | 作者: 资质认证
2024世界机器人大会8月21日至25日在北京举办。来自北京具身智能机器人创新中心、宇树科技、优必选、智元、星动纪元等领先企业的这届世界机器人大会上,人形机器人是绝对的焦点。一起来领略人形机器人的风采吧

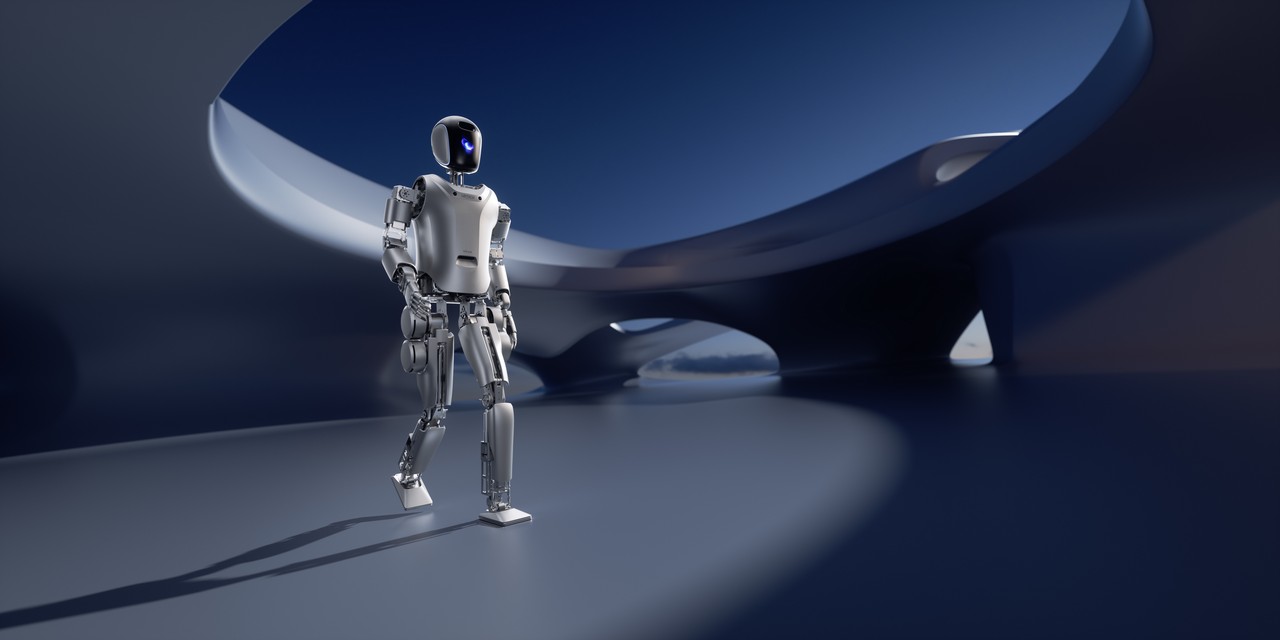
应用领域:这款仿生机器人能成为“智能管家”服务生活,包括家庭陪护、家庭教师等。
特点:自由度39个,单臂最大负载5kg,双臂最大负载10kg,最大走路的速度5km/h。
应用领域:具备拿水杯、搬运箱子等灵巧操作能力,具备斜坡、碎石地、草地等非平整路面稳定行走能力,可在工业制造、安防巡逻、应急救援等领域进行拓展应用。

特点:身高163cm,体重达56kg,具有42个自由度,内置多个视觉感知传感器及六维力传感器,配备惯性测量单元(IMU)和3D视觉传感器,拥有每秒550万亿次的算力。“天工”是创新中心发布的全国首个通用机器人母平台,实现了全球首例纯电驱全尺寸具身智能机器人的拟人奔跑。
应用领域:目前,“天工”已经实现了全链路具身智能能力闭环,涵盖从感知指令到执行任务的全流程,能完成语音交互、无序抓取等复杂动作,未来“天工”将持续进行技术迭代和功能升级,以适应更多复杂场景,服务于工业、制造业、商业、家庭等多个领域,更好地助力新质生产力的发展。
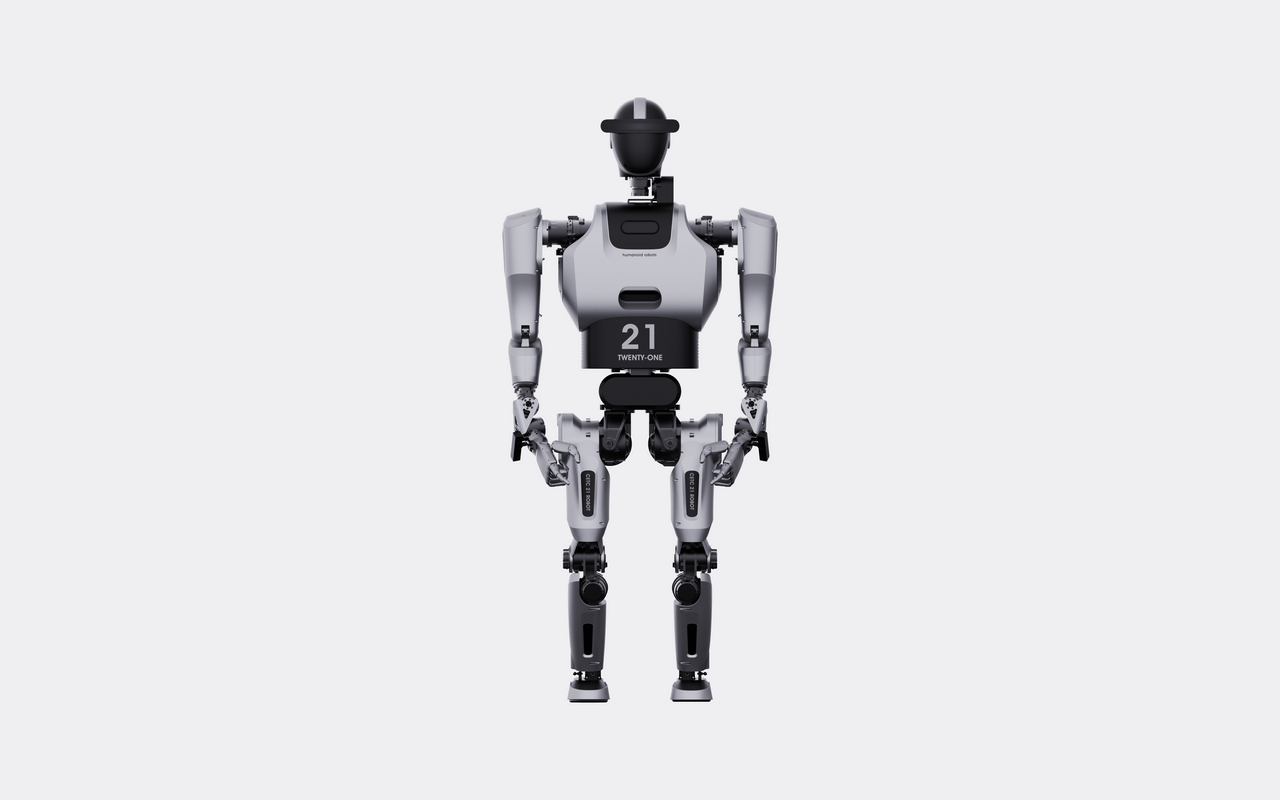
特点:全球首款全尺寸开源公版人形机器人。身高185cm,体重82kg,拥有高度仿生的躯干构型和拟人化的运动控制,支持多模态机动、多模态感知、多模态交互和多模态操控,全身多达43个主动自由度,最大关节峰值扭矩400N.m,算力支持400TOPs。
应用领域:用化和模块化的设计理念赋予青龙人形机器人功能结构一体化的特性,能够支撑多任务能力的通用行走平台。青龙人形机器人同时具备高机动下肢行走配置与轻量化高精度上肢作业配置,支持快速行走、敏捷避障、稳健上下坡和抗冲击干扰等四大运动功能,是通用AI软硬件开发的理想载体。

特点:整机具备41个自由度,身高1.65m,体重约60kg,更贴近人类尺寸。单臂负载达到5kg,末端精度达到0.1mm,真正具备工业实际场景作业能力;多自由度灵巧手有15个手指关节,6个主动自由度,指尖力10N,单手重量600g,关节速度150度/秒。领航者2号逐步提升了全身协调控制与拟人化动作映射执行能力。机器人行走更加协调,学习新动作更快,还可以实现高自由度作业臂连续动态运动下稳定站立。
应用领域:全身协调稳定行走、拟人全身模仿学习、类人具身智能导航、通用高精智能操作。

特点:中国科学院自动化研究所多模态人工智能系统全国重点实验室王鹏研究员团队长期聚焦类人灵巧操作机器人和具身智能等方面的研究,目标是让机器人能够像人一样用灵巧的双手完成各种任务,推动机器人在服务、工业及特种领域的广泛应用。
应用领域:类人自由度灵巧手Casia Hand-H、通用型灵巧手Casia Hand-L、高速自适应灵巧手Casia Hand-S,以及领域首创的“灵巧手AI智能算法包”,可应用于服务、特种、工业等多种领域;面向科研与服务领域的“无忧”机器人、面向特种领域的“无畏”机器人、面向工业领域的“无际”机器人,部分型号机器人已开始在科研、工业等实际场景中进行应用验证。
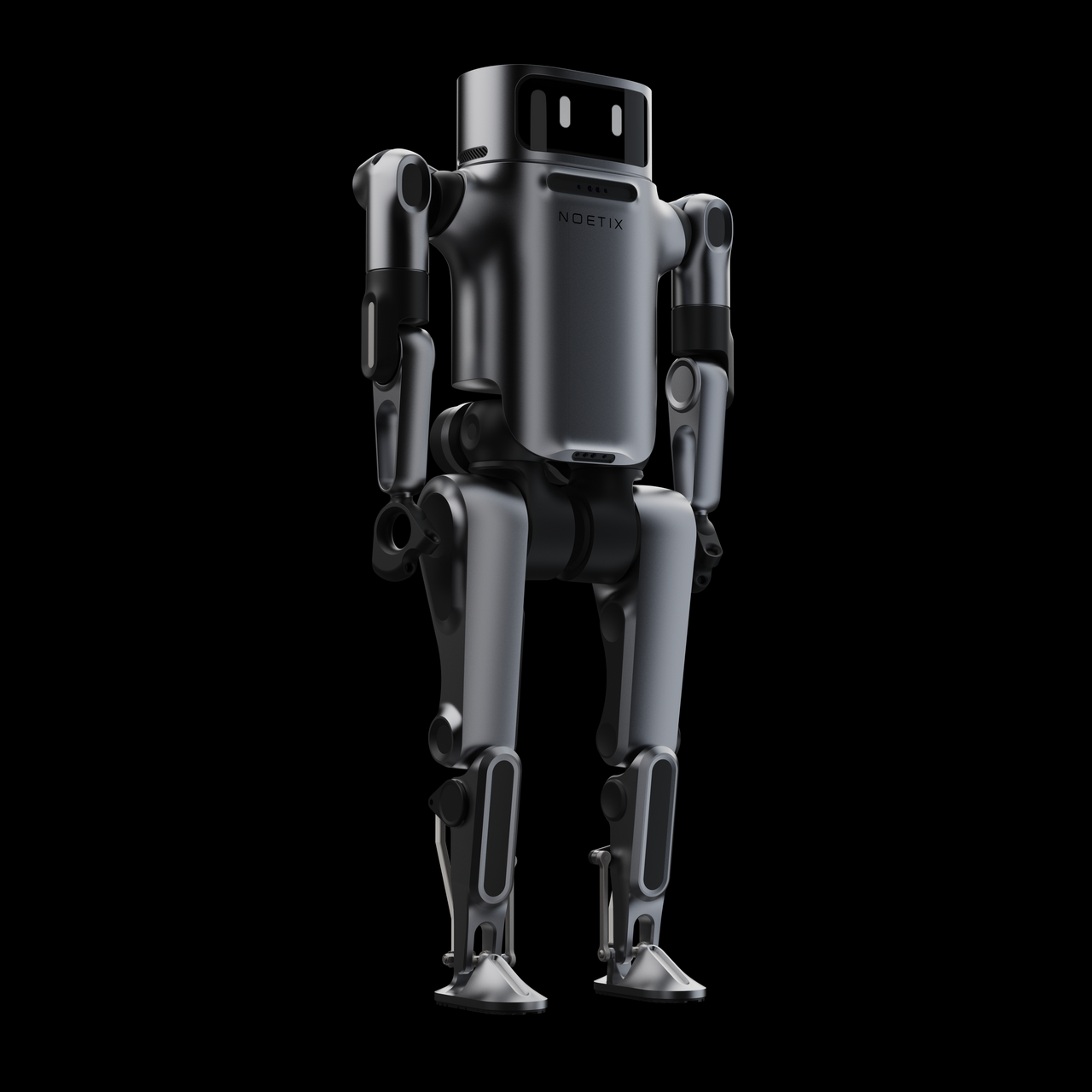
特点:Dora是NOETIX Robotics自主研发的最新一代产品级双足人形机器人。搭载高性能仿生机器人关节,具备高扭矩密度、高力矩带宽等特点,峰值扭矩120牛·米。整机采用轻量化设计,机身总重量25kg,高度1.2m。搭载高放电倍率高性能锂离子电池,可实现续航时间大于2h,搭载NOETIX Robotics自研的超高动态性能强化学习运动控制算法,可实现拟人奔跑、上下楼梯等步态效果,最大移动速度超过2m/s。
应用领域:具备导航避障、视觉识别、语音交互、基于大语言模型的具身任务执行、拖拽示教、遥操作等功能,能够像人类一样直腿行走、拟人行走、取快递、倒垃圾等。
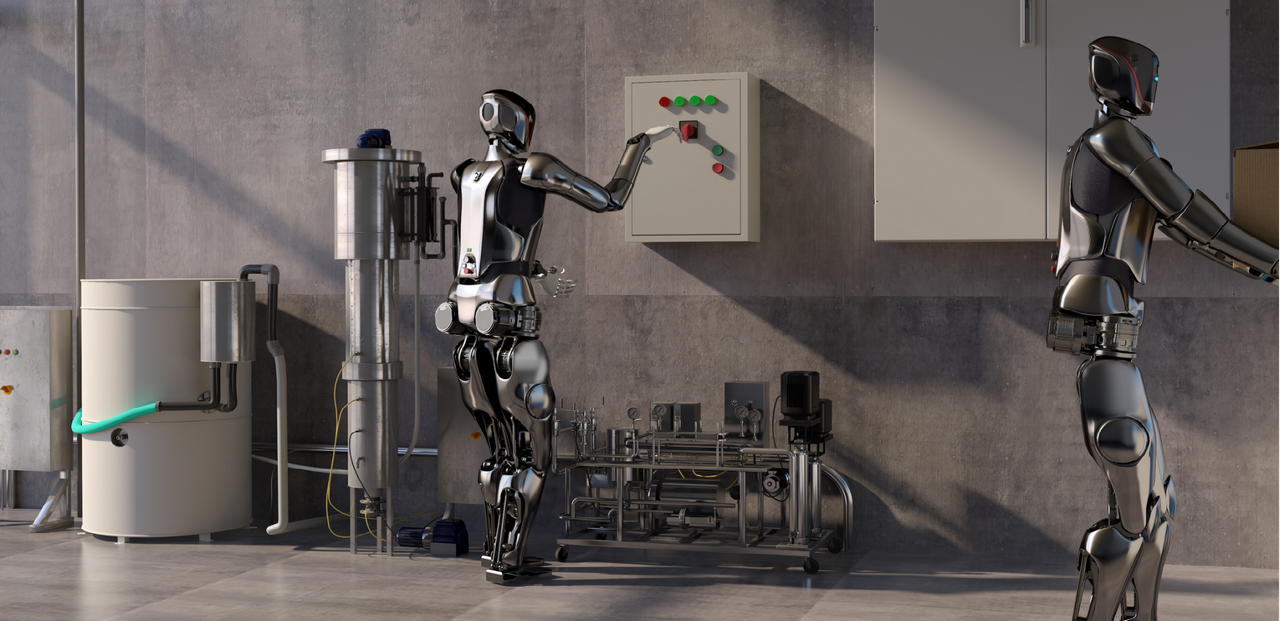
特点:工业版人形机器人Walker S,身高1.7米,外观比例更接近人类,其搭载了41个高性能伺服关节以及全方位感知系统,机器人的自主运动及决策能力大幅提高,
应用领域:工业版人形机器人Walker S系列能够完成多种任务,并可以与工人、AGV、无人物流车以及智能制造管理系统协同,为工业场景提供稳定、可靠、安全、实用的服务。可在工厂流水线实现精准安全同步的作业,赋能新型工业化,助力汽车工业高质量发展。
特点:拥有高度仿生的灵活双臂,覆盖人体上肢的主要自由度。稳健运动基元、多模态基础模型、小样本策略适应、长视角操控。
应用领域:家政服务人形机器人Wanda,可以承担多种不同生活场景下的家务劳动,为人们的家居生活创造更便捷美好的体验。

特点;拥有高度仿生的躯干构形和拟人化的运动控制,覆盖人体的主要自由度,最大关节峰值扭矩达到 360N/m,具备快速行走、敏捷避障、稳健 上下坡、抗冲击干扰等运动功能。
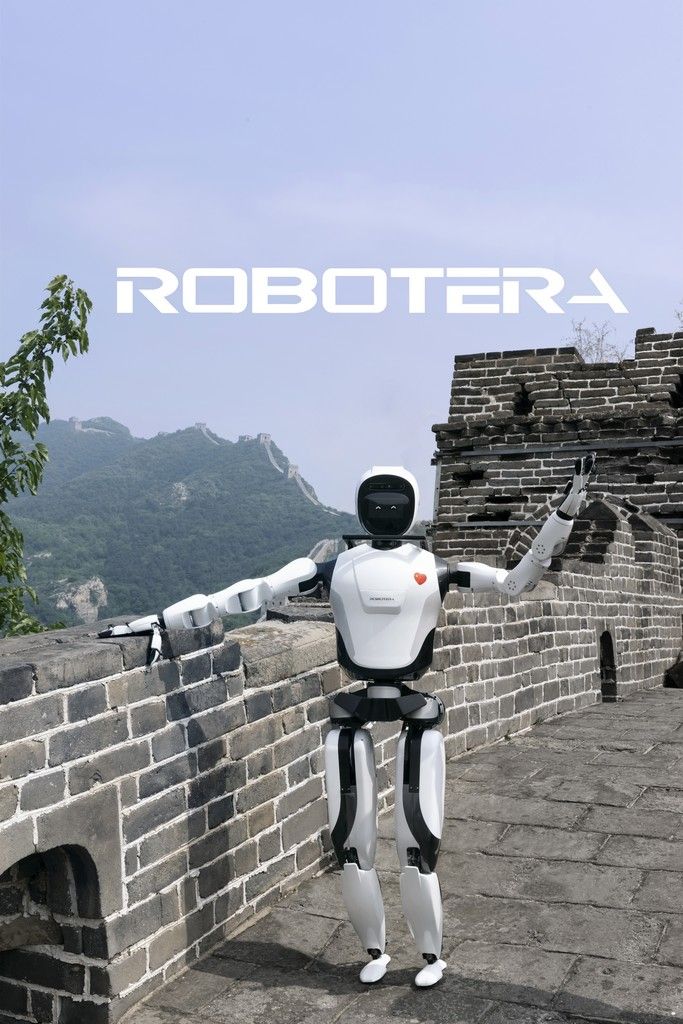
特点:身高1.65米,全身54个自由度,是世界上首个登上长城的人形机器人,可稳定行走于户外多种复杂路面。
应用领域:可实现在草坪、石子路、雪地上稳定行走,具备上下楼梯、背负重物、深蹲、跳跃乃至于举重等复杂动作能力。可应用于制造业及商用场景。

特点:具有双足式、轮式及桌面式3个版本;X1可搭载自研灵巧手XHand,每只手拥有5个阵列式触觉传感器和12个主动自由度,可以在一定程度上完成与人手相近的精细化操作。可以迎宾、打招呼、握手、舞动、打太极、快走、弹跳、上楼梯等。

特点:钛虎人形机器人T170A高1.7米,使用钛虎自主研发的轻量化关节模组及灵巧仿生手搭建,自重仅48kg,单手负载达5kg,全身44自由度,带激光雷达及双目相机,采用英伟达Jetson AGX Orin 64GB作为控制器。腿部关节扭矩密度高达220Nm/kg,为业内平均水平的2-3倍,可以实现单腿跳跃的高难度动作。

特点:整机高度1.2米,具有高精度、高惯量、低自重等特点。配备英伟达Jetson Xavier主控,与独立四个副控协同工作。移动底座配备高性能激光雷达,超声波传感器和2D视觉等丰富感知;采用直驱电机驱动,最大运行速度达1.2m/s; 最大爬坡高度2CM;最大爬坡角度15度。整机最大续航高达8小时。

特点:Mercury B1双臂半人形机器人共有17个自由度。 它配备两个A1七轴机械臂,具有单臂独立操作和双臂协同操作的能力。 头部配备9英寸高清液晶触摸屏,支持多点控制和用户定制表情显示。 它还配备了NVIDIA Jetson Xavier边缘计算核心作为主控模块。 高达21TOPS的AI性能结合集成的3D摄像头,可以完成2D/3D机器视觉引导、抓取和VR远程操作。

特点:身高 1.1 米,重量不足 30 公斤,单人即可轻松拿起并进行调试。内置英特尔 i7 处理器和英伟达 AGX Orin,可提供 200 TOPS 的 AI 算力。搭载深度相机、IMU、麦克风阵列等多种传感器,可以在一定程度上完成环境感知、任务决策和人机交互等多种任务。全身采用力控准直驱关节,均支持双编码器,无需复位即可轻松启动。在运动状态下,机器人能轻松实现1小时以上的续航。
应用领域:支持全向行走、行走抗扰、跌倒爬起、踢球等多项能力。产品提供高层运动接口和底层硬件接口,并兼容 ROS2 生态和多种仿真环境,可支持用户快速进行二次开发。
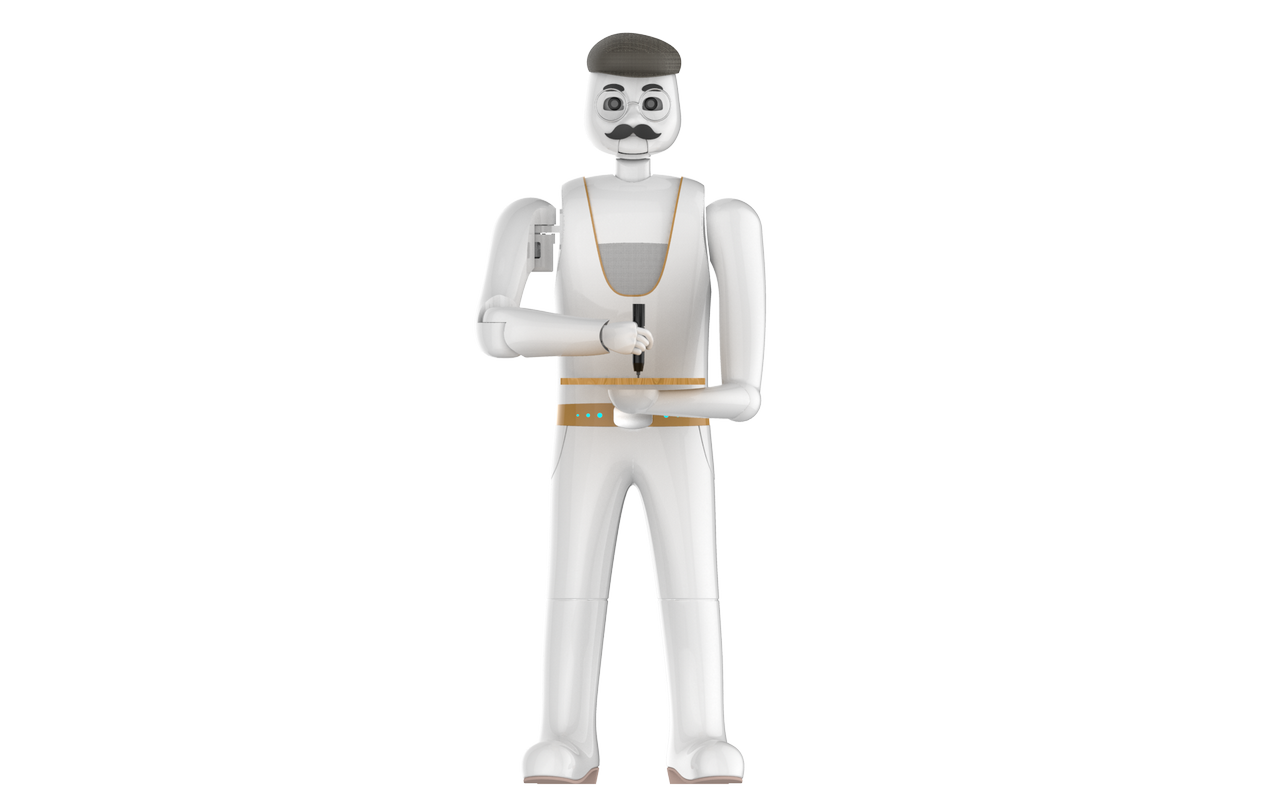
应用领域:是一款实时手绘人像的智能人形服务机器人,观赏性高,具有广阔的应用前景。

特点:采用 AGV 底盘,通过视觉引导自主规划路径和智能避障。基于双目立体视觉技术,可精准定位待采摘蔬果三维位置,进而通过手眼伺服做到“眼到手到”。

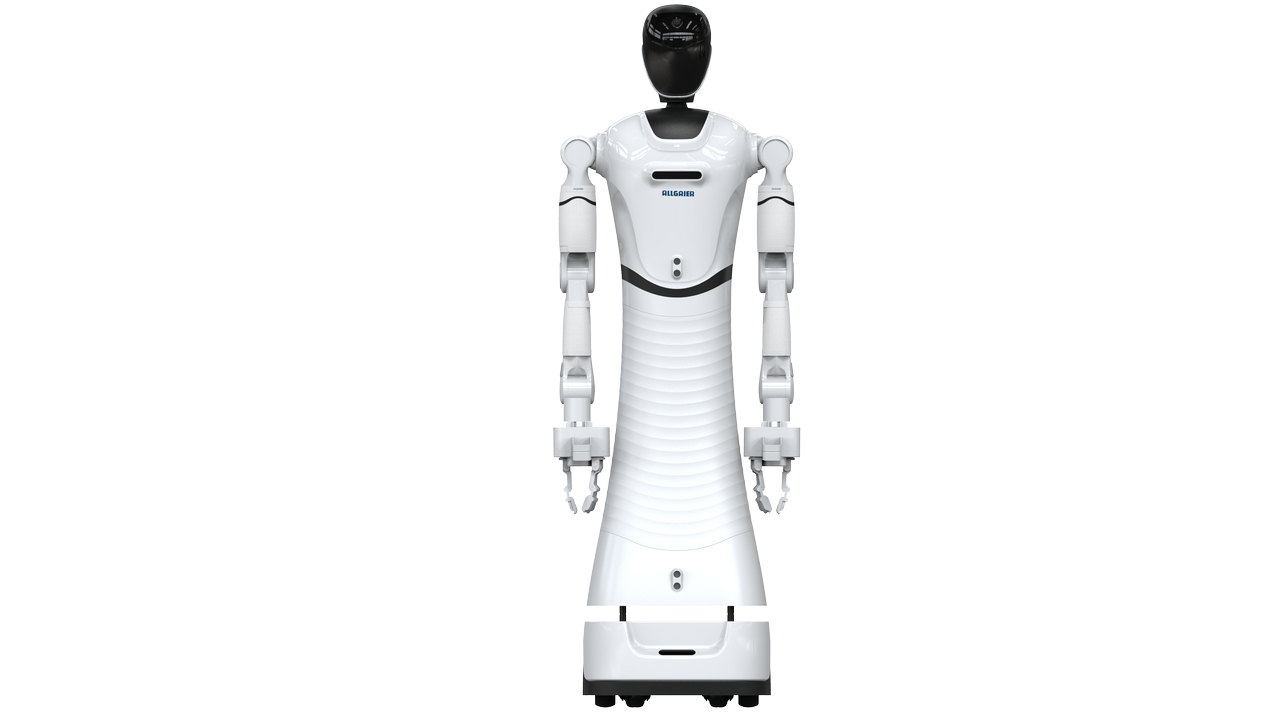
特点:具有自行走、自学习、自认知的功能,在不同工作环境下,通过自主学习可完成物品认知、物品取放、交流互动等功能。
应用领域:在家庭、酒店、商超、医院等场合可提供各种服务功能,提升人们日常生活的智能化水平。

特点:身高1.73米,体重85公斤,可以在一定程度上完成360°的转向。其折叠的设计使得盖博特既能以“蹲姿”稳定抓取地面上的物体,超长的双臂设计又能使其站立后摸高2.4米,拥有比人更大的操作空间。是“硬件本体”+“小脑大模型”+“大脑大模型”的集大成者。Galbot在大小脑模型的联动下,可实现95%+的泛化操作真机成功率。
应用领域:研发了能反思、可随机应变的操作大模型系统SAGE,在大小脑模型的联动下,盖博特已能够理解人类自然语言并根据语言指令与人类交互。
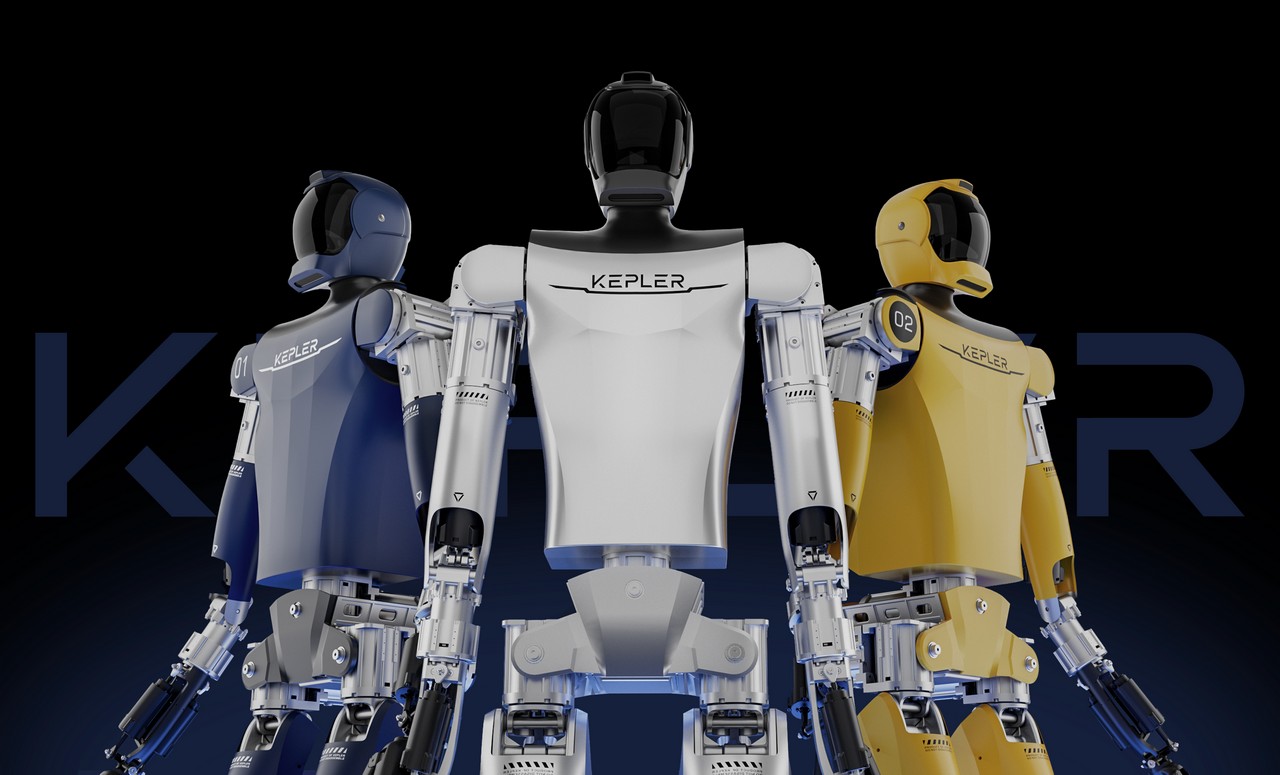
特点:高度仿线个自由度,精准感知力量实现手部灵活性。自研行星滚柱丝杠执行器 是由开普勒自主研发和的一体化执行器,集成滚柱丝杠、驱动器、减速器及编码器为一体,用以控制四肢,推力达到8000N,比普通电机定位更精准、爆发力更强、响应更迅速,能应对更多复杂任务。 自研旋转型执行器 用于腰部及关节处,转动峰值扭矩达200N.m,重复定位精度达到0.01度,为驱动躯干提供强大的动力支持,并且能高效稳定运行。
应用场景:教育科研应用、智能巡检、自动化生产线、搬运和运输、高危作业、户外作业。

特点:紧耦合多模理解通过视觉表征学习构建图像特征编码器,借助桥接器抽取关键信息并实现跨模态对齐,以端到端微调保障多模态对话式任务理解及泛化能力。复杂任务拆解成功率超过95%,开放场景物体寻找成功率超过85%。
特点:天链人形机器人T1 Pro,身高约1.60米,全身自由度71个,重量43公斤,关节最大扭矩达到450Nm,手臂单臂负载8kg,最大负载16kg,负重深蹲突破145kg。关节活动范围能够达到舞蹈演员的活动灵活度,其中髋关节具备-25°~142°的运动范围,膝部关节具备-10°~155°的运动范围,腰部左右具备±45°运动范围,腰部前后具备±90°运动范围。关节角速度达到720°/s,部分关节可达到900°/s。机器人最大走路的速度10km/h。

特点:星海图全尺寸双臂仿人型机器人R1站立高度约168厘米(与175厘米成年人高度等效),重量约70公斤;其具备80厘米的操作半径,和下触地面、上触2米的操作空间。R1配备了星海图自研双臂轻型高动态 6 自由度机械臂A1,4 自由度躯干(支持升降、俯仰、横摆) 和全向矢量底盘,用以支持各种场景下的移动操作需求。备了激光雷达和深度摄像头,能够在复杂环境中自主导航和避障;内置先进的语音识别系统,能够理解和响应用户的语音指令。
